



开卷!不要跟我说数量,现在我玩位置!
国内激光雷达纷纷上车,特斯拉无奈,也不得不照着做。激光雷达上车的话,对于推动智能驾驶非常有利的。汽车正从传统路线到智能驾驶变革,国外已经实现智能驾驶,想要实现自动驾驶,就离不开激光雷达。传统造车我们失去了先机,这次变革我们必须成为最牛一批。
3月底路特斯汽车在英国发布了其最新纯电车型Eletre,4颗激光雷达也追平了喊出『4颗以下别说话』口号的长城机甲龙。两周后,集度汽车揭秘了其首款汽车机器人概念车车头部位的设计细节,从目前曝光的资料来看,集度汽车将两颗激光雷达集成在了机舱盖上。不得不说,2022年的激光雷达真的是很忙啊!
不要给我说数量,现在我玩的是位置!那么我今天分析下新时代的关键部件——激光雷达。
激光雷达上车难在哪里?
激光雷达上车要经历一系列重要步骤,包括功能定义、系统设计、软件开发、测试验证及系统集成等,每一个环节都有诸多细节需要磨合。而且在推动自动驾驶技术进步这条路上,曾有两条不同的路径选择,一个是直接切入L4级自动驾驶,另一个则是选择L1-L5级的渐进式发展路线。单单依靠视觉感知,显然是不够了。
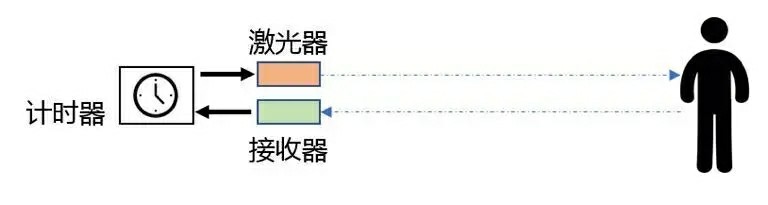
从工作原理上说,激光雷达以激光作为信号源,由激光器发射出的脉冲激光,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离。脉冲激光以超高频率不断地扫描目标物,就可以快速复建出目标的三维模型及各种图件数据,建立三维点云图,绘制出环境地图,以达到环境感知的目的。并且其抗干扰能力非常强。但这需要强大的计算机计算能力,和超级完善系统来实现。
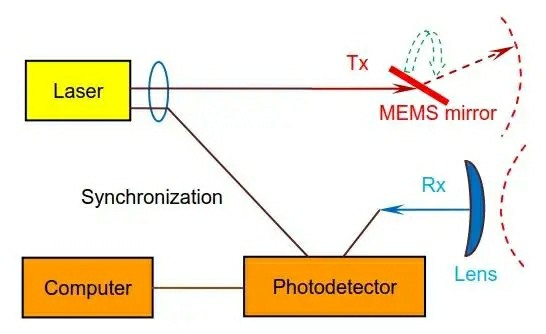
激光雷达,从架构模式,扫描方式,微机系统,转镜方式,应用类别,安装位置等等都需要解决,尤其安装位置很不好选择,已经不是数量的因素,也过了安装在高处就能看的更远的阶段了。

位置的选择要解决连续振动、高低温、高湿高盐等环境下连续工作的问题,安装的位置又不会形成互相干扰,所以非常难以把控。所以说现在不要给说数量,伦家现在玩的是位置。