



OCC占用网络正式“上车” 极越01终于迎来全国“首个第一”?
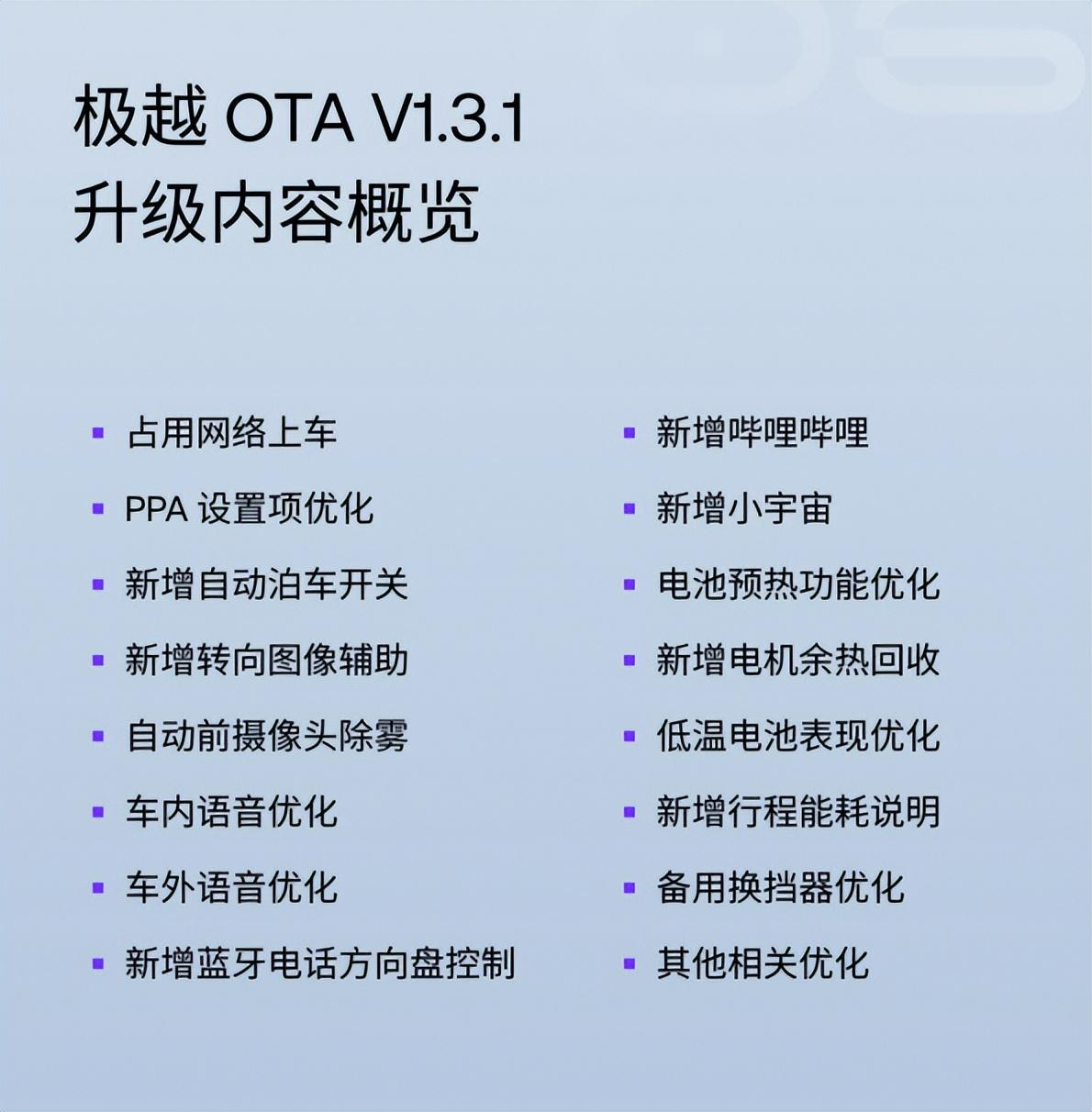
【EV视界报道】2月23日,极越宣布向全量用户OTA推送V1.3.1版本软件。本次发布的V1.3.1新版本涵盖了智能辅助驾驶、充电与续航、SIMO语音以及多媒体娱乐等领域。其中,具有里程碑意义的OCC占用网络成功“上车”,使极越成为我国首个全量推送OCC占用网络的新势力。同时,极越推出全球首个高阶智能驾驶专属保障产品“智驾保”,预计于2月底上线,为用户在使用极越“纯视觉”高阶智驾时提供坚实的风险保障。

当前,智能驾驶系统主要分为“多模态融合”和“纯视觉方案”两种。多模态融合方案依托激光雷达、毫米波雷达等感知设备,虽能更便捷地识别外界物体和车辆,但随之带来的车辆成本上升。因此,依赖摄像头获取感知信息的纯视觉方案成为在降低成本的同时实现高阶智能驾驶的最佳选择。
针对纯视觉方案的智能驾驶,极越01的整体技术方案采用BEV(Bird's Eye View)+ Transformer+ OCC(Occupancy Network)占用网络技术。那么,OCC占用网络在此次方案中的意义何在呢?
首先,纯视觉方案的难点就在于如何通过摄像头来获取一个完整的3D立体感知信息。
BEV(Bird's Eye View,鸟瞰图)作为一种视觉信息处理技术,其主要功能是将二维信息作为输入,结合测距感知方式,最终呈现为三维环境。
而此三维环境被称为BEV空间。
而Transformer可以被视为一种超级强大的“信息理解机器”。
在智能驾驶系统中,Transformer主要负责处理和理解车辆通过传感器收集的关键环境信息,比如摄像头拍摄到的过路行人、路边桩筒等等,而它利用这些信息来帮助车辆作出决策,比如何时加速、何时减速,或者何时改变车道等。
在此之前呢,BEV+Transformer的组合便在极越01这款车上量产并且实现了“纯视觉”的高阶智驾,但存在的提升空间在于:如何有效识别异形障碍物,如何拥有更高的场景泛化的能力。

在高级驾驶辅助系统中,Transformer扮演着关键角色,它从多个透视图像的特征中查询相应信息,并将这些信息融合和更新到BEV 特征图中,如摄像头捕捉到的行人、路边设施等。这些信息将助力车辆作出明智决策,如加速、减速或变更车道等。
此前,BEV+Transformer的组合已在极越01车型上实现量产,成功完成了“纯视觉”的高阶智能驾驶,虽然获得了不错的成效,但随之而来的一个问题也就浮出了水面。
在自动驾驶领域,摄像头的环境感知是通过分别识别可行驶区域、车道线、其他车辆、行人等,并将这些信息整合实现的。
然而,由于不同传感器或物体识别结果可能存在冲突,在信任度判断时,如何取舍成为问题。
此外,在BEV的深度神经网络(DNN)模型训练阶段,需要为照片中的每个物体指定类别,并在标注数据上标识各类物体,比如告诉系统,什么是树,什么是马路牙子。若遇到训练集中未包含的物体类型,或模型表现不佳,则可能导致问题被忽视,而系统也就会忽视这个物体导致事故的发生。
那么如何能解决这类问题呢?OCC占用网络技术就是答案之一。
所谓OCC占用网络技术,其原理是通过获取体积占据信息,使得系统能够在三维空间中精确地定位物体并识别其形状,而非仅在二维平面上进行识别。
简而言之,该技术通过将环境分割为网格,并区分其中哪些区域被占据,哪些区域空闲。
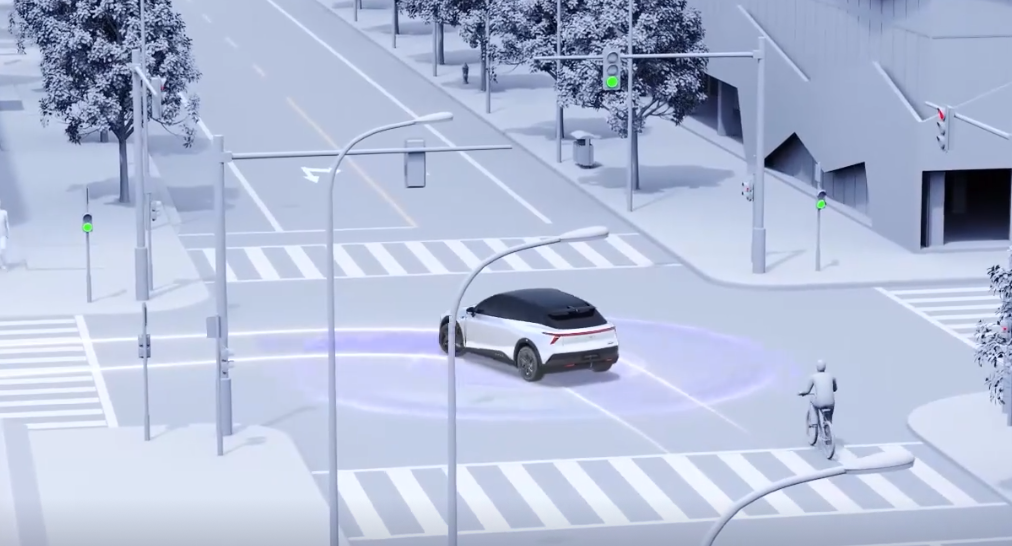
OCC占用网络技术将整个感知画面划分为众多小立方体(或体素),并预测其是否被占据,从而提供更精确的物体形状信息,这在理解复杂场景和避免碰撞过程中至关重要。
与传统视觉方案需识别已标注物体相比,OCC占用网络技术仅需判断区域是否被占据,而不关注占据该区域的具体物体。因此,该技术能够处理未知、不常见的物体,降低因未识别物体导致的意外情况。并且其能够对障碍物进行3D精细刻画,模型精度可达厘米级,比肩甚至超越激光雷达。
同时,OCC占用网络对于运动障碍物的速度识别精度能达到0.1米/秒误差范围。大幅提升了对于栅栏、护栏、水马和施工隔离栏等有一定长度的通用障碍物边界的识别能力,有效进行避让、刹停等,留出更多安全行车距离。
此次,极越01成为我国首个实现“纯视觉”技术方案量产的智能汽车,并将“BEV+OCC+Transformer”正式命名为“B.O.T三向箔”。极越纯视觉高阶智驾在可用范围上行业领先,PPA智驾已覆盖全国超过40万公里的道路,全国90%的高速高架均可应用高速PPA,城市PPA已成功应用于上海、北京、深圳、杭州等4个城市的主要城市道路。

极越CEO夏一平表示:“OCC占用网络大幅提升了纯视觉的异形障碍物识别和场景泛化的能力,B.O.T的完整技术架构,给用户提供能用、好用、爱用、安全、安心的高阶智能驾驶。接下来,极越纯视觉高阶智驾很快就将实现全国都能开,安全全覆盖。”

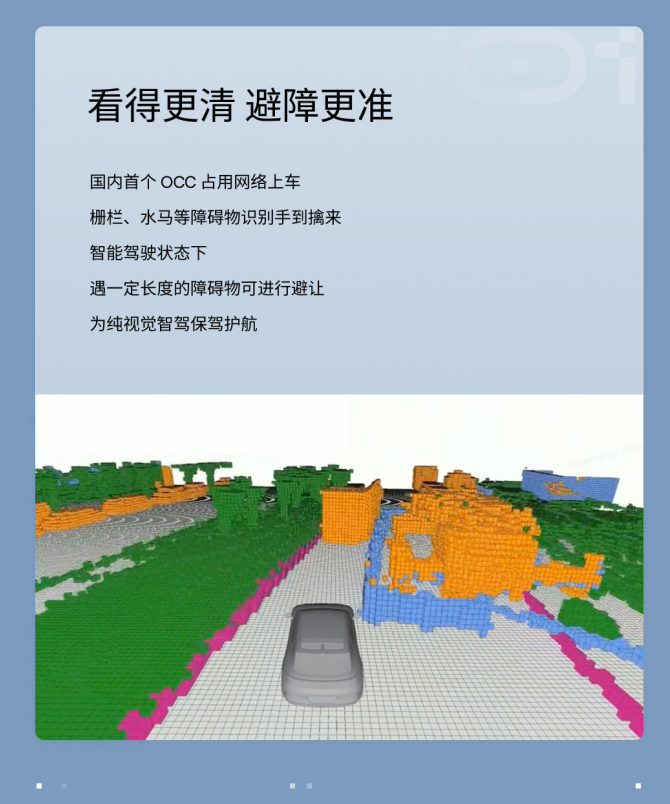
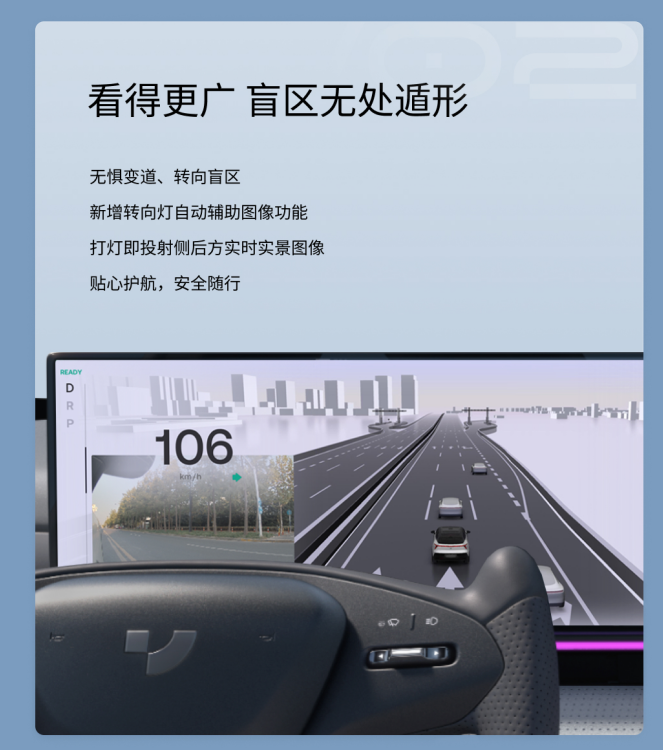
除此之外,V1.3.1版本软件新增转向图像辅助功能,在左右转向灯启动时,可实时呈现侧后方实景影像,缩小盲区,从而提升驾驶安全性。
据了解,PPA智能驾驶体验得到进一步优化,取消了P挡操作限制,允许在驾驶过程中关闭PPA设置开关。此外,新增车内自动泊车功能开关,便于用户手动开启或关闭自动泊车功能,结合车外语音助手,实现上下车全场景泊车。
并且,还新增了摄像头自动加热除雾功能,可根据车内外温度、湿度等条件自动启动,解决因前摄像头起雾导致的智能驾驶功能受限问题,使极端天气下也能正常驾驶。
在智能驾驶领域之外,智能舱方面亦取得了相应的升级成果。
V1.3.1版本的软件更新为用户带来了更为丰富的娱乐功能,新增的B站和小宇宙等应用使用户在观看剧集、追踪动漫及收听播客方面体验更为流畅。同时,语音交互功能得到显著提升,使座舱内的娱乐体验更为多元和便捷。
此外,SIMO智能助手在该版本中实现了显著的进化,语音识别和准确性方面取得了较大进步。车内体验得到全面优化,包括App语音控制的改进、3D智能驾驶地图的个性化设置,以及副驾驶座位的有/无人感知识别等新功能的加入。这些改进使SIMO能够实现真正的“所见即所得”,让用户享受到一触即发的便捷。
在车外,语音唤醒和识别效率的提升,以及在开启空调、播放音乐等场景下的稳定性增强,均极大地提升了用户体验。此外,在自动泊车过程中,用户只需唤醒SIMO,便可立即暂停泊车操作。同时,泊车功能的语音提示和开门时的障碍物警告也得到了优化。
针对用户经常使用的智能互联功能,V1.3.1版本亦进行了升级。新增的方向盘右侧按键允许用户控制蓝牙电话,包括接听、挂断和静音等操作,确保用户不会错过任何重要来电。UI界面显示体验得到优化,DOCK栏新增的音源显示功能,使界面信息更加清晰和明确。
三电技术实现了全面飞跃,为电动汽车的性能和效率注入新活力。预约出发功能得到重大升级,新增了一项创新特性:车辆现在能够从极越家充桩直接取电,实现“插枪保温”。这意味着在寒冷的环境中,电池可以提前通过桩端电量进行预加热,确保每次出发都能享受到满电的驾驶体验。
此外,新版本还引入了导航至充电站时的电池自动预加热功能。一旦开启此功能并导航至快充站,系统将自动启动电池预加热,有效缩短充电所需时间。同时,新增的“立即加热电池”按钮让您能够随时启动预加热过程,不仅减少了充电等待时间,还能进一步提升续航里程。
为提高能源利用效率,新版本还增加了电机余热回收技术。这项技术能够将电机运行产生的热量回收利用,用于加热电池。这不仅提高了电池的温度管理效率,还能显著提升约6%的CLTC续航里程,使您的电动汽车在寒冷环境下保持出色性能。电机余热回收技术,让每一分能量都发挥到极致,为您的电动汽车保驾护航。
整体而言,可以说,极越01成为国内首个搭载OCC技术的量产智能汽车,这一成就标志着中国在自动驾驶技术领域取得了重要的突破。OCC技术的应用,使得极越01在“纯视觉”智能驾驶方面的能力得到了显著提升,特别是在异形障碍物识别和场景泛化能力上,这对于提高自动驾驶的安全性和可靠性具有重要意义。
此外,极越01的这一技术进步也体现了中国汽车制造商在智能驾驶技术研发上的投入和创新能力。随着技术的不断迭代和优化,极越01的智能驾驶体验有望进一步改善,为用户带来更加安全、便捷和舒适的驾驶体验。同时,这也可能会推动整个行业在自动驾驶技术方面的发展,促进相关产业链的成熟和完善。