



吃饱了骂厨子!我们真的要和高精地图说拜拜?
毫无疑问,新能源技术的崛起正在深刻改变整个汽车产业,而智能驾驶技术已然成为其中发展最为迅速的关键技术之一。
就目前各大车企所推出的大部分新车来看,在其宣传的口径上,智能驾驶能力的声量尤其最大。
但现在有一个话题却成为了被大家热议的话题,智驾所用的高精地图,该不该被抛弃呢?
什么是高精地图?
对于一些不具备高阶智驾能力的车来说,大部分都会采用手机地图或者车载导航来进行驾驶。
但这类地图与高精地图则相差甚远。
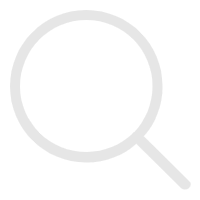
通常,手机导航地图的主要使用者为人类,其功能为导航和搜索。相较之下,高精地图的主要使用者为计算机,主要用于高精度定位、环境感知、规划与决策等任务。因此,导航地图在车内被视为车载信息娱乐系统,通常配备显示屏;而高精地图则属于车载安全系统,无须显示屏。
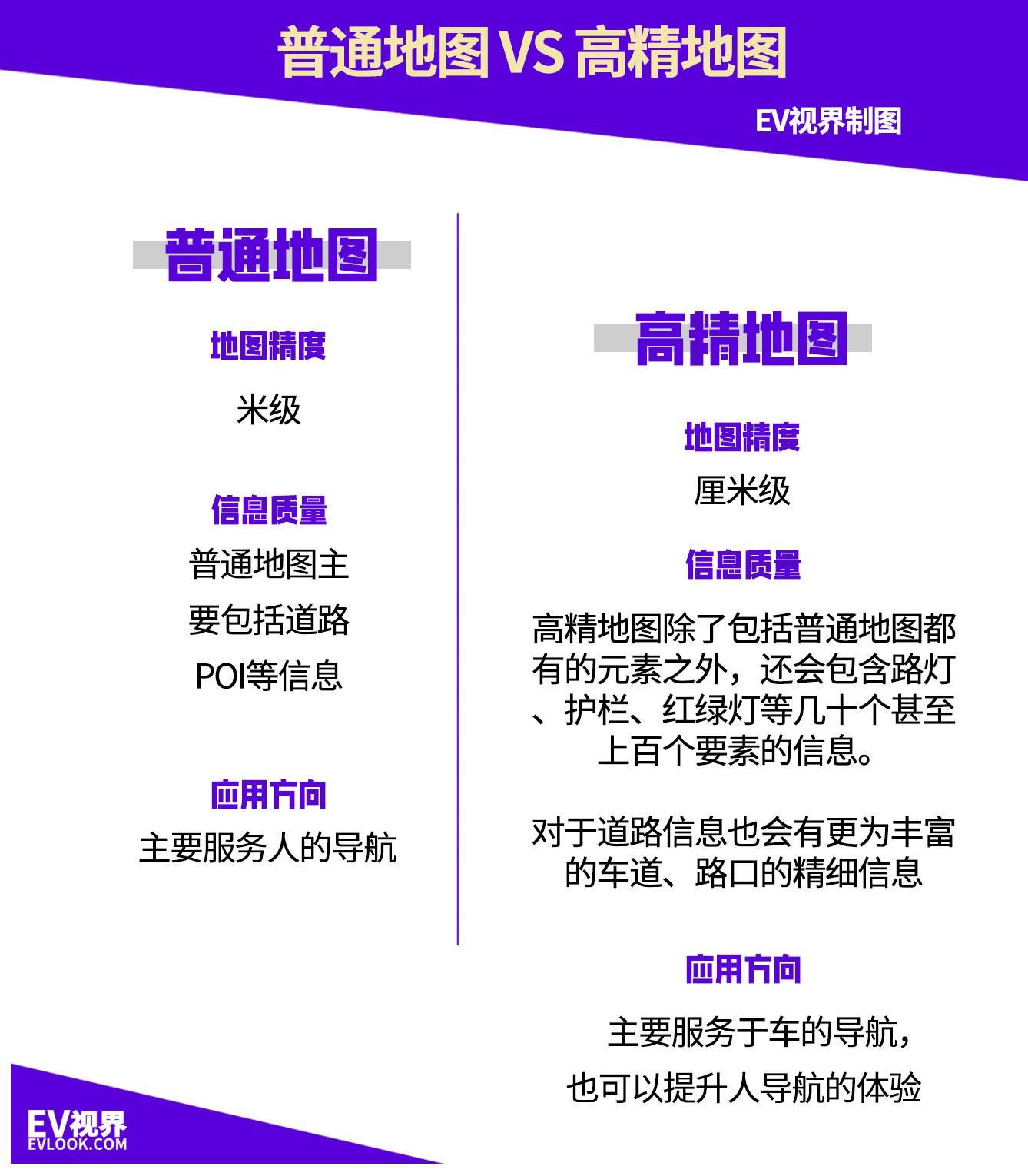
在地图要素和属性方面,导航地图主要包含简洁的道路线条、信息点(POI)以及行政区划边界等;高精地图则包含更为详细的道路模型,涵盖车道模型、道路部件、道路属性以及其他定位图层等。
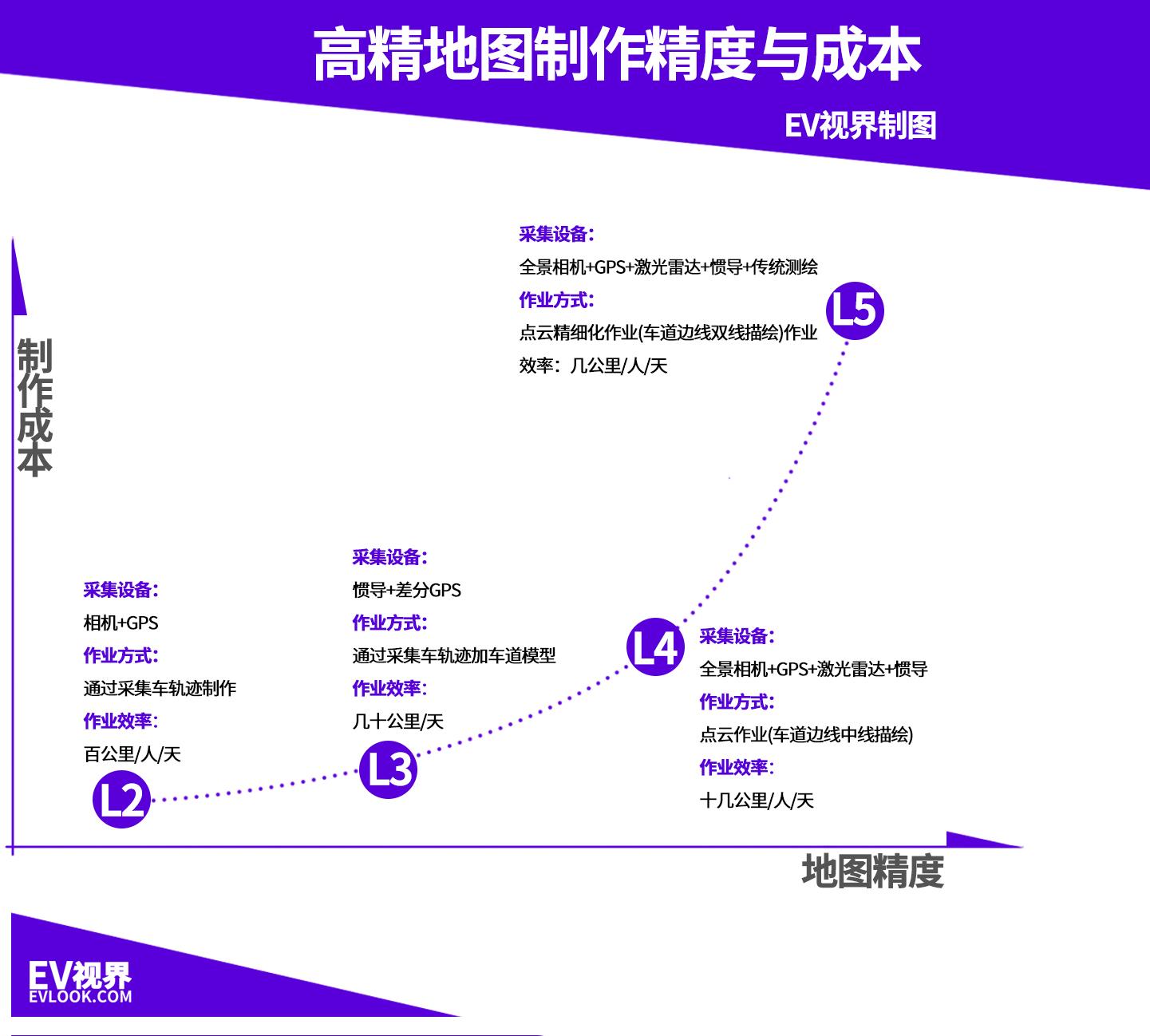
就目前来说,智能驾驶分为L1-L5这五个级别。

在车载地图的应用中,不同级别的智能辅助驾驶对地图精度的需求存在显著差异。
首先,在L1-L2级别的智能辅助驾驶中,由于这类系统缺乏自主规划行驶路线的能力,因此只需米级精度的地图即可满足需求。
然而,随着自动驾驶级别提升至L3,车辆本身具备了一定的线路行驶能力。在这种情况下,除了大部分区域仍需米级精度的地图外,部分区域需要厘米级的地图导航,从而使车载地图成为必要之选。
最后到了L4级别以上,车辆要从一个城市抵达另一个城市,并且期间要让车辆始终保持一个自主驾驶状态,因此,这一地域的地图都必须具备厘米级的高精地图才行。
所以说,高精地图就是铺设在自动驾驶前面的轨道,可以让车辆始终保持在“正轨”中行驶。
高精地图能带来什么?
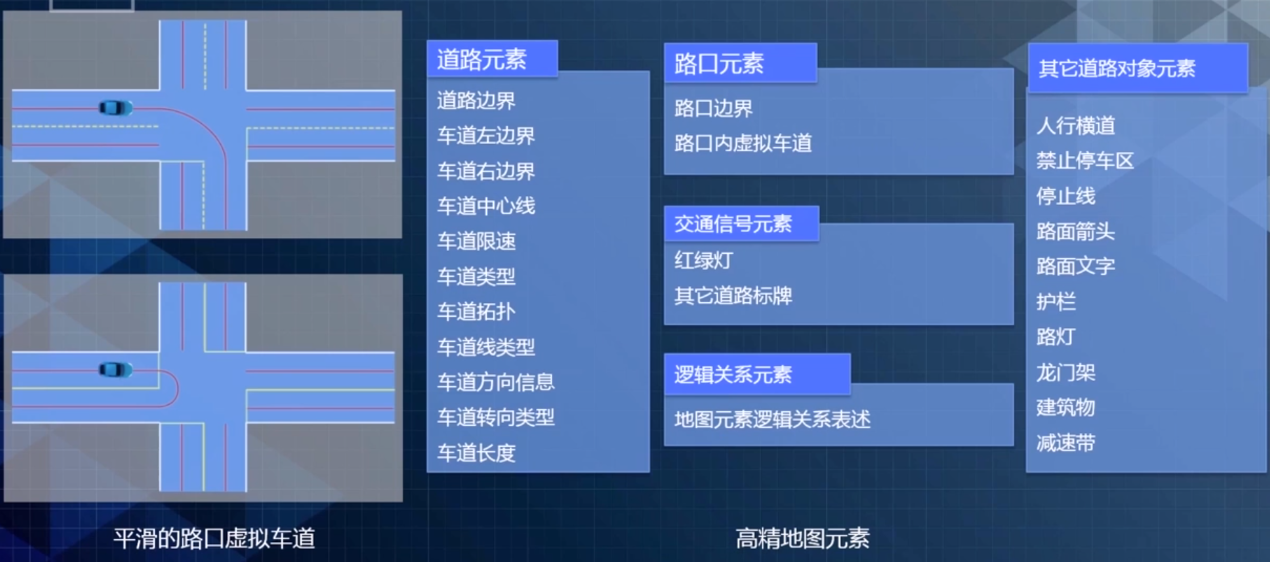
作为高精地图,首先要满足车道级的自动驾驶导航,因此需要包含道路细节信息,如车道线、车道中心线、车道属性变化等,比如能让汽车知道哪些区域是虚线能够变道。
此外车道模型中还需要包含道路的曲率、坡度、航向、横坡等数学参数,好让车辆能够准确的转向、制动、爬坡等。这些信息构成了车道模型。还需要包含交通标志牌、路面标志等道路部件等。
可以说,高精度地图为自动驾驶系统提供了超越传统传感器感知范围的能力,极大地扩展了车辆对周围环境的认知界限。然而,自动驾驶依赖的传感器探测距离有限,可能导致控制响应时间缩短,进而可能引发决策失误或反应不及时。
举个例子,比如在100公里/小时的速度下,摄像头仅能捕捉到9秒内的道路状况(且需在直线道路上),这在复杂路况下可能远远不够。如果车辆需要在500米外的出口匝道切换车道,而该匝道仅允许特定车道通行,那么车辆必须提前作出变道决策。9秒的时间可能不足以完成这一操作,从而增加了错过路口的风险。
然而,借助高精度地图提供的超视距信息,如匝道出口位置、弯道曲率和坡度等,自动驾驶系统能够提前规划变道动作并调整车速,有效避免错过路口。
此外,高精度地图还能提供感知冗余,弥补传感器在特定情况下的不足。例如,在复杂的光照条件下,传感器可能难以识别红绿灯;在视野被遮挡时,可能看不见车道线;在雨天,雷达的噪声可能会干扰其性能。在这些情况下,高精度地图能够提供预先设定的参考信息,增强车辆的感知能力。
高精度地图还能提高感知效率。
通常自动驾驶系统通常需要通过图像数据来识别红绿灯,若系统需不断扫描整个图像进行分析,将耗费大量计算资源和时间。然而,借助高精度地图的辅助,系统可以根据定位信息,预先确定需要关注的区域,仅对特定区域(ROI)进行图像分析,从而快速准确地识别红绿灯及其状态,这种方法显著减少计算负担并加快识别过程。
那么,为何最近又有了摆脱高精地图的呼声了呢?
其中最大的原因就是——成本。
对于高精地图来说,制作一个区域的内容,需要进行以下几个步骤:
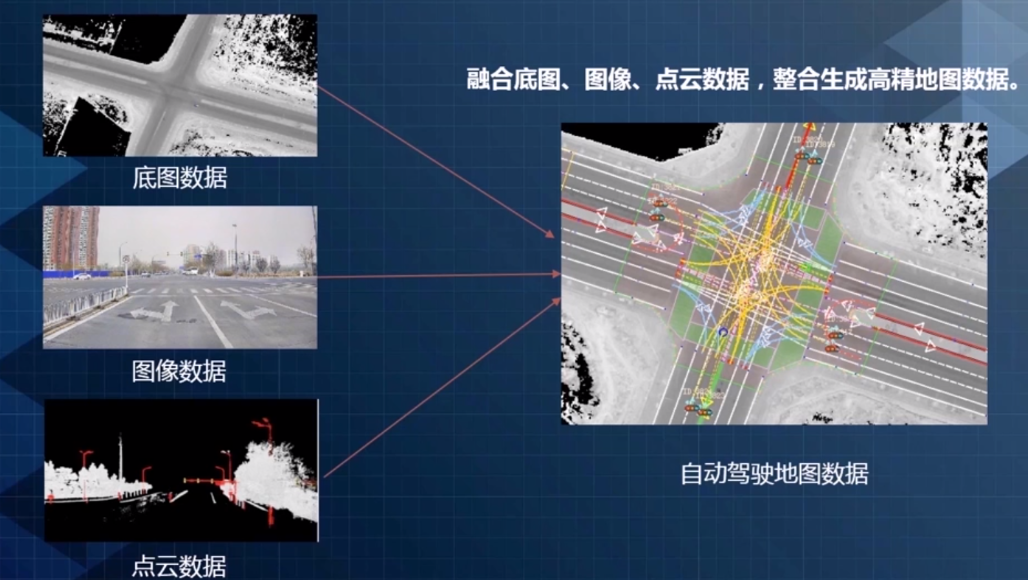
1.数据采集:这是制作高精地图的第一步,需要通过专业的采集车或设备来收集道路的详细信息。采集车通常配备有激光雷达(LiDAR)、GPS、惯性导航系统(IMU)、摄像头等传感器,用于获取道路的三维空间信息、车辆定位信息以及周围环境的视觉信息。
2.数据处理与标注:收集到的原始数据需要经过处理,包括数据清洗、滤波、配准等,以提高数据质量。随后,对数据进行三维矢量信息提取和点云标注,这可能涉及车道线、交通标志、信号灯等关键元素的识别和分类。
3.元素识别与提取:在数据处理的基础上,进一步识别和提取道路的各种元素,如车道模型、道路部件、道路属性等。这些元素的准确识别对于高精地图的实用性至关重要。
4.人工验证:尽管自动化处理可以大大提高效率,但在某些情况下,人工验证仍然是必要的。专业人员会对自动化处理的结果进行检查和修正,确保地图的准确性和可靠性。
5.产品编译:经过上述步骤处理后的数据将被编译成最终的高精地图产品。这个产品通常包含静态数据层和动态数据层,以支持自动驾驶系统的各种功能,如路径规划、定位、感知等。
6.更新与维护:高精地图不是一次性产品,随着道路环境的变化,地图需要定期更新和维护。这可能涉及新的数据采集、处理和验证工作。
然而,当高精地图到了企业产品以后,需要企业用自身的车队进行验证行驶,之后在投放到市场。
在市场竞争中,用户反馈的问题经过车企传递至高精地图供应商,供应商进行优化或更新。
然而,此过程循环往复,无穷无尽,导致成本不断攀升,并且由于无法跟上用户体验的更新速度,部分问题的解决只能通过降级方式,从而使用户体验逐渐恶化。

除此之外,政策限制也是原因。
因为,高精地图涉及大量的地理信息和个人位置数据,这些数据在某些情况下可能触及国家安全和个人隐私。因此,各国政府通常会对地图数据的采集、处理、存储和使用制定严格的法律法规。例如,中国的《测绘法》规定了测绘资质的要求,并对地图数据的发布和使用进行了限制。这些政策要求地图服务商在合规的前提下开展业务,确保数据安全。
不仅如此,地图测绘是一个受到严格监管的领域。企业需要获得相应的测绘资质才能进行地图数据的采集和制作。例如,中国要求企业在申请测绘资质时满足一定的技术人员数量、设备标准等要求。这些政策限制了市场参与者的数量,提高了行业门槛。
不靠高精地图,如何实现智能驾驶?
事实上,对于那些告别高精度地图的汽车制造商而言,随着BEV大模型的成熟以及芯片算力和感知设备的提升,车辆本身已具备对路面信息的感知和判断能力,从而实现更为稳健的智能驾驶。
所谓BEV感知方案,全程Bird''s Eye View,意思就是视觉为中心的俯视图。一般来说,国内的大部分车企则选择了包含视觉和雷达的多融合感知方案,但它们的共同点都是需要获得视觉信号或者其他传感器的数据来进行综合运算分析,再通过系统的处理来规划行车轨迹。
但是,在这个过程中,每个独立传感器收集到的数据往往受到特定视角的局限,经过各自的分析运算后,融合阶段会导致误差叠加,无法拼凑出道路实际情况的准确全貌,给车辆的决策规划带来困难。
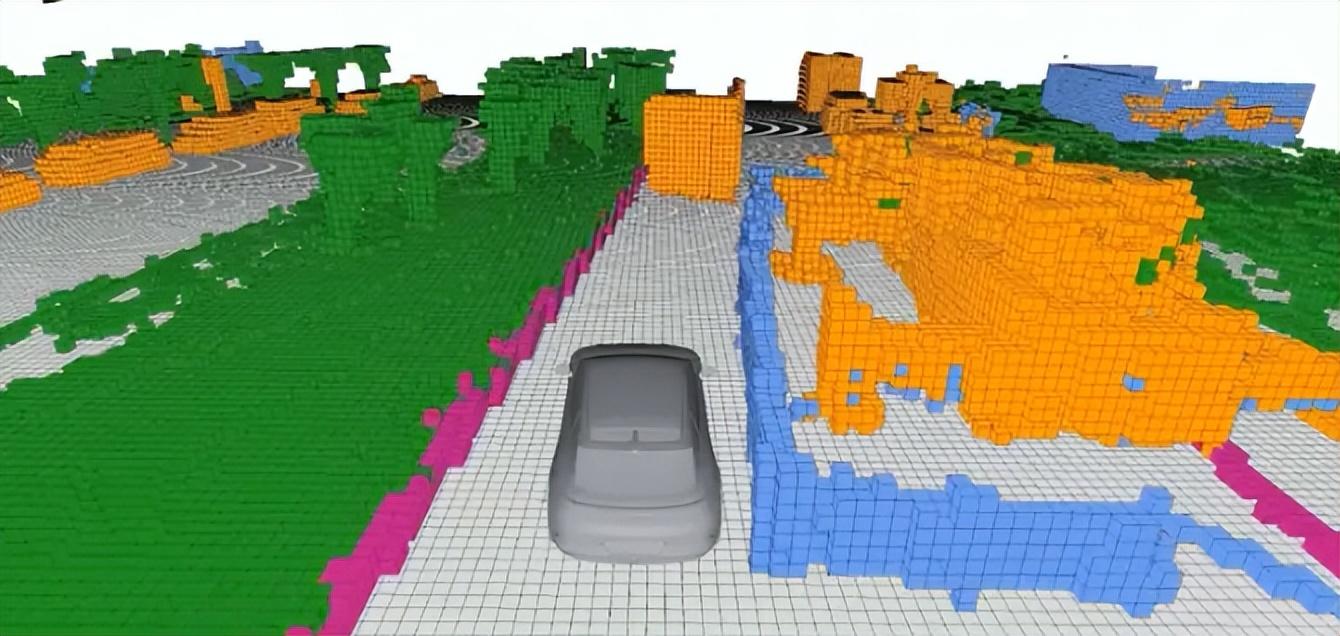
而BEV自动驾驶感知利用深度学习网络融合采集多传感器数据,将汽车周围的场景转换为俯视图,实时重建周围的静态道路元素和道路拓扑结构,实现高精度的全向感知能力。
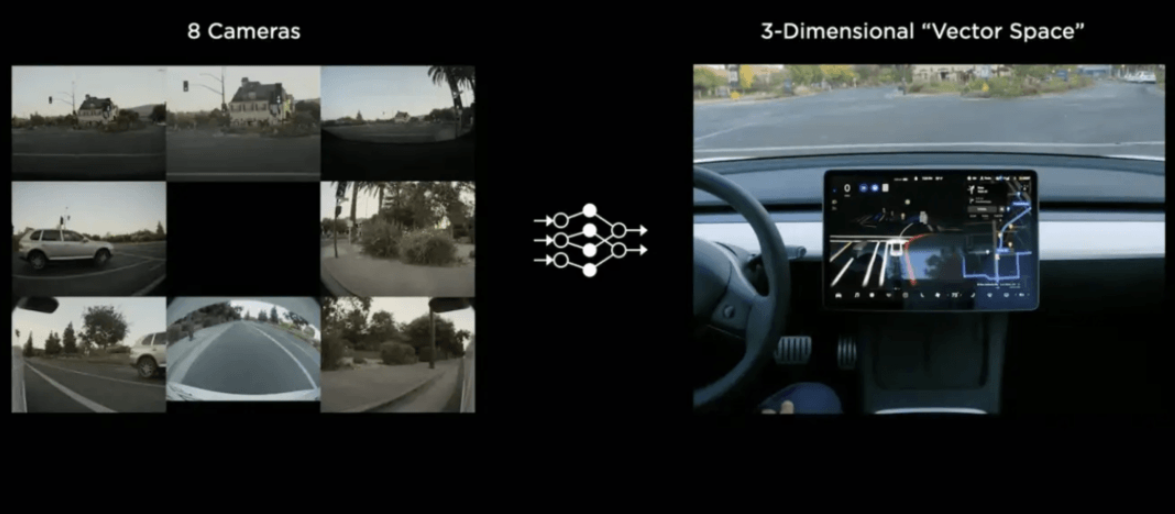
好比是一个从高处统观全局的“上帝视角”,车上多个传感器采集的数据,会输入到一个统一模型进行整体分析推理生成鸟瞰图,能有效地避免误差叠加。
当然,光有感知还不够,决策和处理也是关键。
目前一些智能驾驶在纯视觉方面,除了BEV外还会配合Transformer以及使用占用网络(Occupancy Network)来进行处理。
其中,Transformer将2D图像转为3D鸟瞰视角后,实现实时局部建图和3D识别检测,然而自动驾驶不仅仅只有感知,更重要的是如何像人类驾驶员一样做出最优地驾驶决策行为。自监督认知大模型是在进行大量数据训练后,使得模型具备自我学习能力,而非基于规则的决策规划算法。
而占用网络(Occupancy Network)则将现实世界看成一个3D网格世界,并将这个空间做了无数网格化的分区,分割之后,每一个小方块叫做体素,类似于像素。只要在这个空间的体素下被占用了,都会被系统认为是1,赋值1,否则赋为0。最终,物体在空间里面占据了一定的体素,系统就会把它显示出来,并判定它是一个障碍物。
这里,还要提一句激光雷达。
目前除了少数采用纯视觉方案的企业外,大多数还是将整个感知设备中添加了激光雷达。
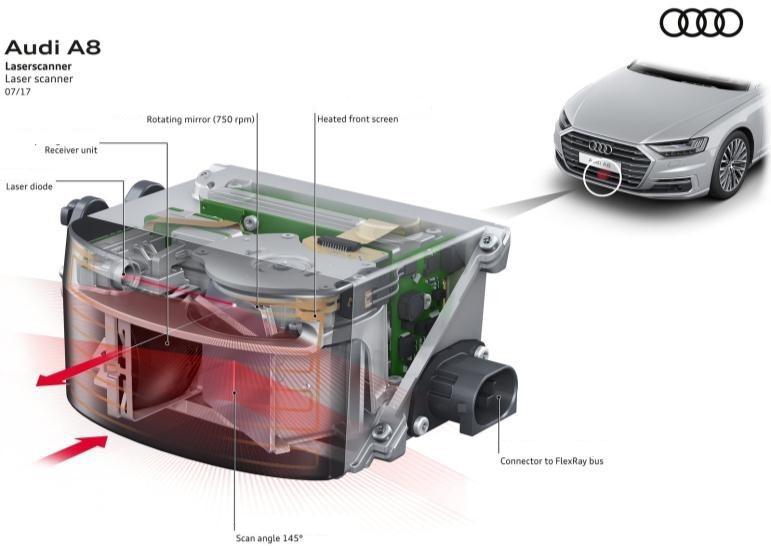
这是因为,摄像头作为车载传感器也存在一些不足,包括识别精度要求高,容易受强光、雨幕、大雾等恶劣天气影响等,所以激光雷达的优势,就被体现在对物体识别度低导致误差。
而在BEV大模型中,它为自动驾驶系统提供精确的三维空间信息,增强对周围环境的感知能力,确保车辆在各种复杂场景下能够安全、准确地导航和操作。简而言之,激光雷达是自动驾驶车辆“看清”世界的关键传感器。
最后我想说一句,之前我在参加一个车企的活动时,它们的工程师告诉我对于自动驾驶来说,高精地图方案才是最终解。虽然,对于他的话是否准确先不下定论,但是足以验证高精地图在智能驾驶方面举足轻重的角色地位。
但是,车辆毕竟是一个需要接受市场消费比拟的东西,谁的价值更加划算才会成为消费者心中的首选,更何况一些地域还限制了高精地图的使用,因此弱化高精地图在所难免,而这样会成为行业发展的全新方向。
最终,我想强调一点,曾在某汽车制造商的活动中,其工程师表示,自动驾驶技术的最佳解决方案应为高精地图方案。
尽管对于此观点的正确性暂不置评,但无疑,高精地图在智能驾驶领域发挥着至关重要的作用。然而,鉴于车辆作为一种消费品,其市场竞争力取决于性价比,部分区域甚至限制了高精地图的使用,因此高精地图的地位势必受到影响。这也将引领行业发展呈现出新的趋势。