



马斯克疯狂喷的激光雷达,究竟有啥“功效”让国内新势力争破头?
在汽车发展竞赛以及各大企业发布产品时,有一个必备的竞赛项目成为了各大企业努力的难题,就是辅助驾驶,也可以说为未来自动驾驶打基础的入门功课,而这项功课,对于当下时代发展和未来汽车的走向,都起着至关重要的因素。
辅助驾驶的演变过程
辅助驾驶在最初形态,就是一个非常简单的功能,甚至很多消费者购买以后完全没用过的一项功能——定速巡航:在汽车行驶时,设置好最高时速限制,可以解放持续踩油门的右脚,只需要控制方向盘,车辆会保持匀速前进的姿态进行驾驶,在当年的那个年代,这已经是跨时代的技术突破,电子传感器需要干预和设置发动机以及变速箱匹配到固定时速,而对于众多消费者,这个功能真的是可有可无,甚至很多人压根不知道该这么用?

为什么说定速巡航可有可无?定速巡航的驾驶环境过于苛刻,前方不能有车辆干扰,否则保持匀速前进的姿态下,车主依旧会提心吊胆,即便是解放了右脚不用时刻踩油门,也没办法解决车主驾驶的紧张心态,脚依旧时刻搭在刹车踏板上,保证遇到前方有车辆时第一时间刹车减速,即便是拥有自动刹车功能,在强制降低速度以后,也无法实时提升速度,而这就是辅助驾驶的最初形态,甚至这个“辅助”,起的可能还是副作用。
随着众多传感器被移植到车上,尤其是在车辆前方搭载以后,定速巡航开始进化,变成现在我们熟知的自适应巡航,听到名字想必大家就有所理解,在定速巡航的基础上进行升级,可以用传感器探测前方车辆,从而根据被跟车辆速度实现自身车辆的车速变化,在设置到最高车速以后,前方有跟车车辆时,传感器会根据前方车辆速度变化,实时变更自身车辆时速,保持最优的跟车距离;在自适应巡航诞生以后,才是真正的起到了长途“辅助”驾驶的作用,也才真正让“巡航”功能,被更多消费者熟知和使用。
既然能够“解放”脚,那能不能“解放”手呢?
答案放在今天,还是比较模糊的,为什么是模糊的呢?因为放在目前的交通法规,是不允许手松开方向盘,但按照目前企业宣传的辅助驾驶等级来看,转向系统是无需人为干涉的。
所以,大家应该已经理解,其实从目前的辅助驾驶能力上,是可以解放双手;在车身除了前方搭载传感器和摄像头以外,在车身周围也同样布置传感器以及摄像头,这样汽车在行驶时就可以实时检测周围,对周围进行建模,检测行驶地标线,通过对地标线的学习和数据算法,可以将车身的转向系统以及地标线检测进行融合,在实时检测地标线的同时,通过芯片算法进行实时运算,再对转向系统的操控,就可以将车辆实时变化从而使车辆时刻保持在车道最居中的位置;举一个简单的例子,用人来比喻,人走在路上,人眼看到路况以后,大脑会有自己的思维和想法,然后控制下肢系统,避免障碍物,走到目的地,而这个辅助功能就是目前的车道居中保持辅助。
车道居中保持辅助搭配前文所说的自适应巡航功能,就构成了目前行业内最基本的辅助驾驶,也被称之为L2等级的辅助驾驶,可以完成在长途驾驶中,非常有效且简单的减轻疲劳的作用,而这样的系统也构建了目前辅助驾驶和自动驾驶的最基础的功能。
激光雷达有什么作用?
目前辅助驾驶的硬件通过毫米波雷达以及摄像头等传感器进行对车辆周边的实时运算,而目前的硬件相对来说都有各自的优劣势,关于优劣势,会在下面一个环节去叙述,而在辅助驾驶上,想要突破更高的上限,尤其是进阶自动驾驶甚至无人驾驶阶段,就要去尝试更高阶的硬件去完成想要的效果,激光雷达,就被推了出来。
先不去考虑激光雷达是否会对辅助驾驶或者自动驾驶更上一步的功效,就目前众多品牌企业在激光雷达的竞赛当中,证明激光雷达确有效果,从小鹏P5的两颗,到极狐αS的三颗,再到广州车展机甲龙上的四颗,效果没看到,但是大家在数量上却比的不可开交,可见,作用一定有,但是有多大作用呢?
提到作用有多大,就要先了解什么是激光雷达,激光雷达有什么作用。
激光雷达最早出现在军事,医学等领域设施上,用来建模和探测距离等,由于成本过于昂贵,离我们老百姓还是有着很远的距离;后来,因为激光雷达的成本压缩以及普通设备对算法上的提升,逐渐出现在了大众视野。

激光雷达的工作原理其实相对来说很好理解,激光雷达的工作原理也叫飞行时间测距法,由发射系统、接收系统、信息处理三部分组成;发射系统对目标发射探测信号,也就是一道激光束,然后激光束照射到目标物体以后进行反射,激光雷达内部的接收系统对反射的激光进行时间比对(约为30万千米/秒),通过信息处理系统计算和处理,计算出距离目标的距离。
其实说到这可能还有很多人有一些不太理解,我们打一个比方,假如我们处在一个伸手不见五指的密封空间内,手里拿着一个手电筒,打开手电筒照射前方,通过手电筒的光照射在物体以后,再由物体对光的反射,眼睛接受物体反射的光,大脑对光反射的环境计算,这样,就有了一个基本的探测流程,在探照过程计算光的飞行时间探测距离,而这一个基本流程的获取位置和距离信息中,我们称之为“点云”。

在我们汽车上使用的激光雷达,用一道光束在短时间内发射到不同区域,怎么实现这个过程?
有两种方式,一种是让发光的发射系统自身运动,通过在固定时间内运动次数达到一定,就可以在出点数固定的情况下,获取更多的点云;另一种方式就像我们当年上学坐在窗户边上的“淘气学生”,拿一个小镜子,通过镜子反射的光晃其他同学一样,通过一个反射装置,对发射系统发射出去的激光束进行反射,在固定时间内对反射“镜子”装置运动一定的次数,也可以在仅有一个出点数的情况下,获得定量的点云效果。
这样,就能在固定时间内,探测到想要的范围信息,也就构成了激光雷达的基本工作流。
激光雷达的优劣势
目前,激光雷达更多在非量产车上,所以还很少有消费者能够体验到,而目前能够体验到的更多是之前的毫米波雷达和摄像头等传感器达到的辅助驾驶,关于毫米波雷达和摄像头已经能够满足很多辅助驾驶功能,为何一定要追求激光雷达?他们之间有什么差别呢?
毫米波雷达是通过一种电磁波形式,而毫米波频段比较特殊,频率高于无线电,低于可见光和红外线,频率范围大概为10GHz-300GHz之间,也是非常适合车载领域的频段;毫米波雷达和激光雷达在探测上的工作原理很相似,发射脉冲(波形)获取信息,再通过信息处理计算出目标距离,而因为反射和回波信号决定了信息的内容和质量,所以,毫米波雷达无法保证信号承载的信息的分辨率,只能通过频率增加才能增加分辨率,而在这点上,毫米波雷达大不如激光雷达。

因为激光雷达发射的电磁波是一条直线,主要以光粒子发射,而毫米波发射出去的电磁波是一个锥形的波束,所以在相比毫米波雷达,激光雷达在探测精度、范围以及稳定性上,更具有优势,可以达到厘米级。
而在抗干扰上,由于激光雷达通过发射光束进行探测,容易受到外界环境影响,光束受遮挡以后就不能正常使用,尤其是在雨、雪、雾霾、沙尘暴等特别恶劣的天气中,会受到影响;而毫米波引导头穿透雾、烟、灰尘能力强,所以在糟糕天气也有很好的效果。
因为两种传感器各有优劣,所以还不存在完全取代的说法,更多的是起到相辅相成的效果。
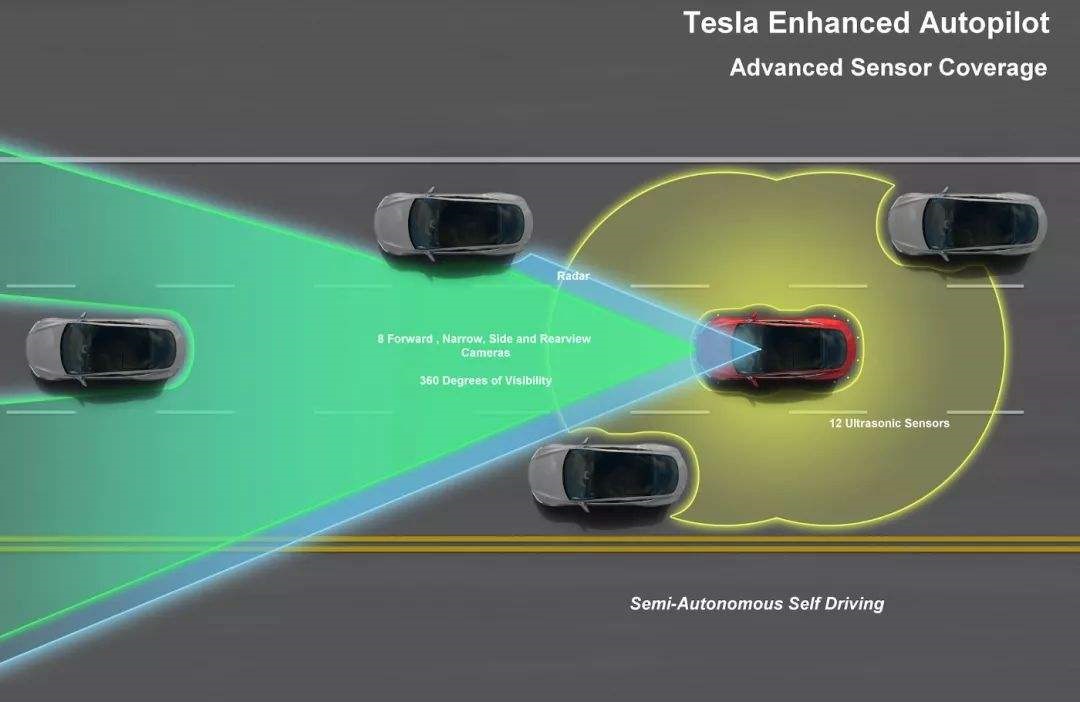
说完毫米波雷达,包括超声波传感器,工作原理和前两者类似;还有一个很重要的就是摄像头,摄像头在对整车的前后左右进行搭载以后,对周围环境的图像信息实时传输给计算系统,但摄像头记录的信息只能做到2D效果,就是我们理解的图片形式,无法做到3D感知,这样对一些物体的模型和概念就有一些模糊,但因为摄像头能够拾取到的信息非常直接,比如在左右摄像头可以非常清晰的探测到路面的地标线,所以,摄像头在辅助驾驶中,也是起着至关重要的作用。
众多传感器,分工明确,各司其职,就铸造了目前我们能够体验到的辅助驾驶。

除了工作原理,激光雷达还有一个特点,因为光束的探照范围是通过多个点云来实现,而想要探照模型更清晰,就要有更多的反射信号,从而来对环境进行更清晰的测量,而反射信号越多,就需要更难的计算系统,也就是说,需要一个更聪明的计算系统,在计算模块上,需要更强的“算力”,来处理和实时计算这些返回的信号和建模信息。
为啥一定要激光雷达
其实目前只有企业心里有一个非常明确的定义,为啥都在争相恐后的搭载激光雷达,毕竟在广州车展上,已经有了搭载四颗激光雷达的机甲龙了,看着各家企业在堆数量的同时,似乎感觉激光雷达一定会对辅助驾驶有强化作用。
前文已经剖析过了激光雷达、毫米波雷达以及摄像头的各司其职的作用,那为啥一定要引入激光雷达呢?
从目前来看,在毫米波雷达搭配摄像头等传感器完成的工作流,已经能够满足目前我们减轻驾驶疲劳的工作效率,而在一些无人送货车等装备上,也不见得一定要加入激光雷达才能实现,当然,当激光雷达的成本价格下探到车企和消费者可以接受的程度上,对于硬件的升级也是一定的。
前文分析过激光雷达相较于其他传感器的优劣势,就证明激光雷达的确是独树一帜的存在。
从原理分析,在辅助驾驶处理单元内部,激光雷达负责主要的周边探测建模,毫米波雷达用来辅佐激光雷达,并且还可以在恶劣天气下做出更好的回馈,加上摄像头提供2D的实时影像,3D建模搭配2D影像,就可以更好的用算法和数据学习能力,对周边的信息做到更精确的探测,更精确的周围信息,就更能有利的提升辅助驾驶的能力,当然,也要建立在算力达标的情况下,保证流畅的数据计算和操作处理。
总结
虽然激光雷达一定可以帮助辅助驾驶能力进行提升,但这个提升绝不只是在硬件堆积上就能够提升,辅助驾驶的运算、数据以及算法优化,才是决定了辅助驾驶的上限和能力,而同样在仅有毫米波雷达和摄像头时,不同企业的辅助驾驶能力和优化也是不同的。
所以,希望车企在宣传时搭载激光雷达数量上的堆积不是噱头,背后能够真正在搭载激光雷达以后对算法、数据以及优化做到深研,这样,才能让消费者得到最好体验感,也能保证消费者未来的认可,而关于辅助驾驶,终将会在未来某天晋升为自动驾驶,究竟需要多久,拭目以待。